

Wheel based Humanoid robot
Jul 2017 – Apr 2018
• Design and development of Humanoid torso with arms and head, which will be placed
on the wheeled base chassis and could do the following tasks:
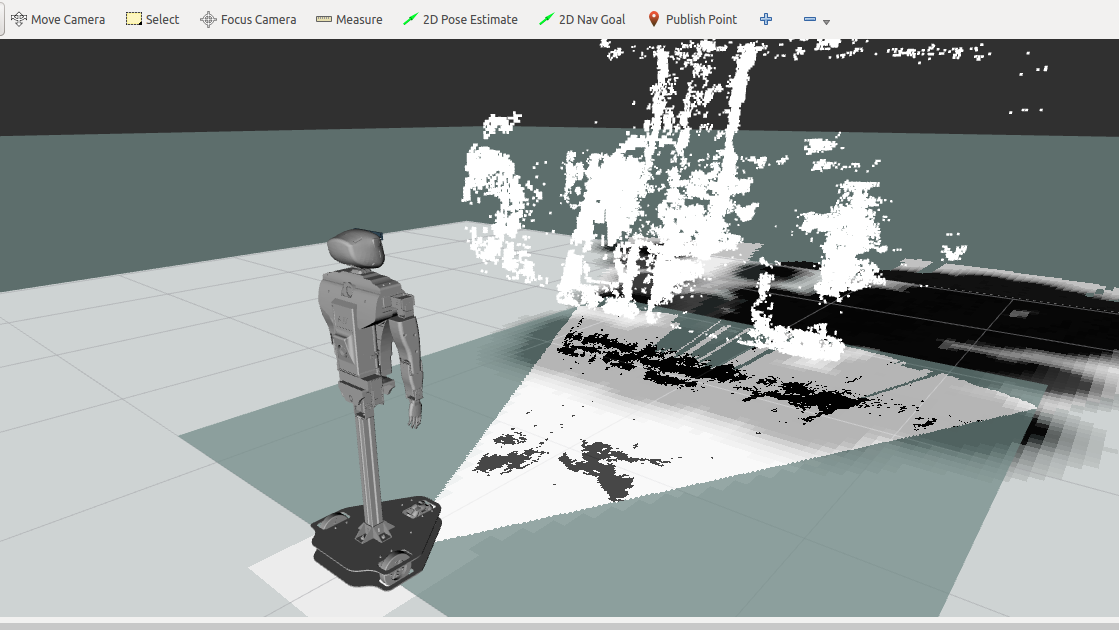
o Autonomous navigation (uses Intel realsense camera and differential drive basechassis)
o Hand gestures like : Waving hands, Hold a tray, shake hand and many
o speech and voice recognition
o and a screen touch display to interact with robot
• Complete robot was build on Robot Operating System(ROS)
• ROS packages link (MoveIt, Navigation stack, Dynamixel SDK Etc) were used to build the system
• Dynamixel motors and faulhaber motors were used to motion the links
• Team of 14 members
• wheel base chassis design and fabrication
• Design Calculations
• Autonomous navigation using ROS
Autonomous navigation code : github page